机器人也能有“触觉”,干精细活。
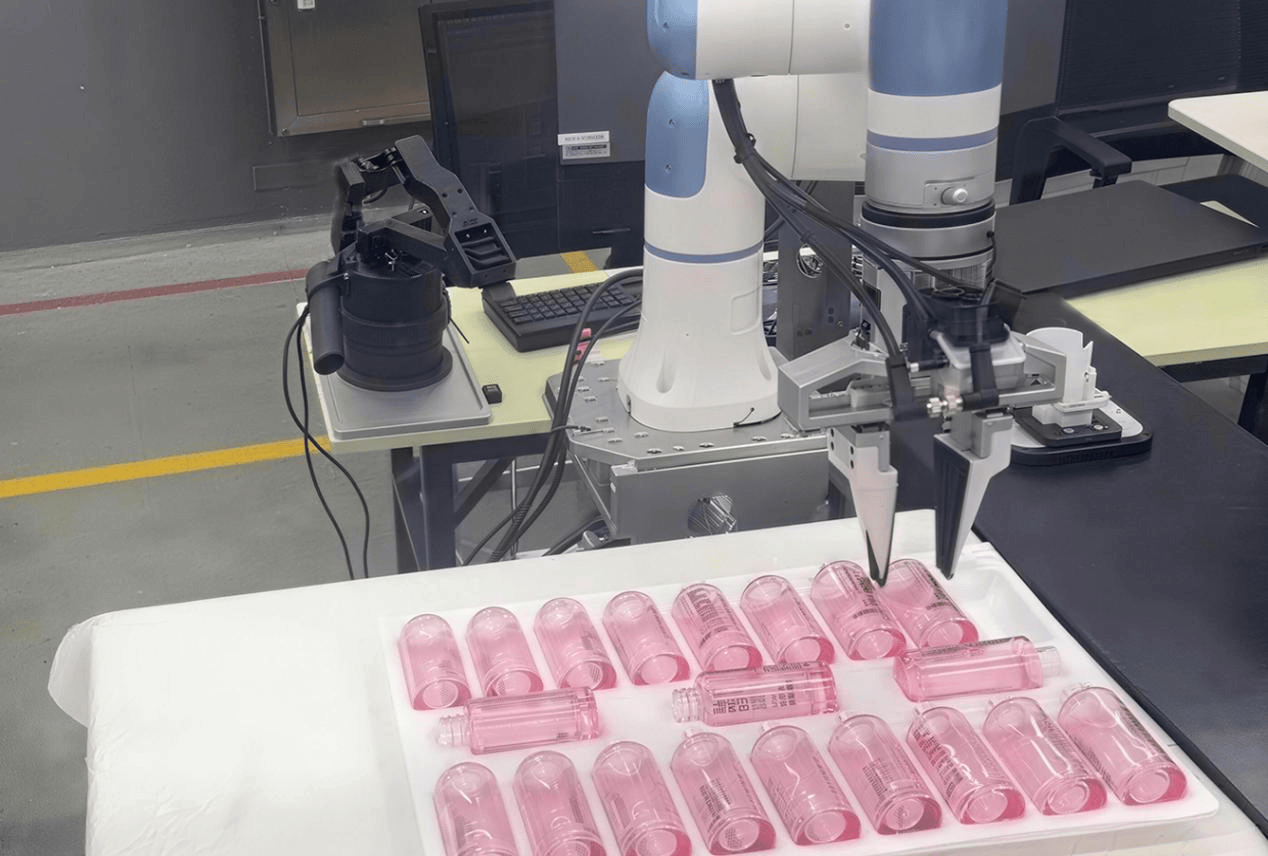
2025年世界人工智能大会(WAIC)于7月26日至28日在上海举行。由复旦大学可信具身智能研究院团队自主研发的高精度、低成本“自适应视触觉AI传感器”首次公开亮相。这只“触觉夹爪”可以拿起豆腐、薯片、果冻等易碎品,根据其纹理、软硬和摩擦特性,精准做到轻起慢落。此外,它还会舀汤圆——控制着勺子,在液体中实时追踪,舀起一颗漂浮的汤圆后,再放入另一个碗中。整个过程全靠机器人动态适应水流扰动和物体位置变化,在无人工控制的情况下展现出高水平手眼协同能力。

这只“触觉夹爪”可以拿起豆腐、薯片、果冻等易碎品,还能精准舀汤圆。本文图片均为“复旦大学”微信公众号 图
能做到这些,正是得益于团队研发的传感器具备柔性、灵敏、“触觉神经”、多维力学探测等特点,还有一套融合了视觉感知与AI算法的创新系统。抓取物品时,它的柔软界面如同人类皮肤般,能适应复杂表面,会自然贴合物体形状,不会像刚性爪那样压坏脆弱物品。同时,它可感知多维受力,包括正压力、切向力,甚至扭转力,能灵巧、安全地与外界交互。
复旦大学可信具身智能研究院研究员陈文明介绍,团队想要机器人不仅能感受到单一的传统压力,而且还能具备类人皮肤的感知,能感知压力、剪切、扭转、滑移等各种复杂力学交互信息。以往,以压力信号为指标的传感技术是单一的感官通道,而下一代具身机器人要突破操作能力瓶颈,必须具备类似人体皮肤的多维触觉感知能力。

为破解这一问题,团队在传感层内置的微小摄像仪起到关键作用。表面接触到力后,传感层的粒子会发生位移,进而被摄像头捕捉到受力形变的信息,再借助AI强大的算力,能将复杂的触觉信号转化为高维视觉数据,并把这些视觉信号精准翻译为力的分布信息,实现力的多维精确解耦。该传感器灵敏度极高,达到每平方厘米4万个感知点,具备超高的空间分辨率。
陈文明表示,利用AI的解耦算法,最小的感知力能做到0.01牛顿,而人类指尖皮肤的最小感知阈值大概在0.1牛到0.2牛之间。相比之下,“触觉夹爪”的感知灵敏极限已达到人体的10倍。由此,该技术在精密加工、电子装配、高精度分拣等行业具备应用潜能。
复旦大学介绍,高性能传感器里头,一端是内窥镜镜头,另一端是多层硅胶材料,再搭配上神经网络芯片,整体制作成本比传统“电子皮肤”降低近50倍,量产后价格还能再下调,有望促进高价值行业的自动化升级。下一步,团队计划对“自适应视触觉AI传感器”进行市场化,同时开展视触觉融合的大模型训练,去解决行业内更有挑战性的问题。该技术应用前景包括搭载触觉技术的机械夹爪精准抓取易损物品、工业制造领域中高精度分拣与精密装配、辅助医疗领域完成微创手术等。该技术还可以和假肢相结合,研制出具备触觉感知能力的先进智能假肢。
今年初,复旦大学可信具身智能研究院成立。研究院专注具身智能的前沿研究与应用落地,是复旦大学面向世界科技前沿的重要战略布局。“自适应视触觉AI传感器”是研究院的重要成果之一,复旦大学可信具身智能研究院团队曾获 2023年度国家自然科学二等奖,其15年的视觉技术积累为该项目的算法实现提供了坚实基础。



 京公网安备 11011402013531号
京公网安备 11011402013531号